¶ Initial support in v1.0.131
Custom CAN selectable (in v1.0.135) for the GPRP package if CAN-stream out of MoTeC doesn't match default GPRP template.
¶ Features
Cuts and blips 0/1 triggers through CAN
¶ Connection
- CANTCU CAN3 is connected to MoTeC
- CAN Speed is configurable
- CAN2.0B, Standard 11bit identifiers
¶ Torque Factor (CANTCU)
To achieve a somewhat realistic torque estimation, the VE (fuel) table needs to be tuned to show real-world VE values. For this torque estimation we use a Torque Factor. The torque factor is generated from engine running values taken from a single point of running (usually maximum measured torque on a dyno run). The values needed for calculation are listed below.
- Maximum Engine Torque (Nm)
- Manifold Absolute Pressure, MAP (kPa)
- Volumetric Efficiency, VE, Fuel Table (%)
Entering these values in the calculation window will generate a torque factor, which will be used as a baseline for torque calculations in the CANTCU.
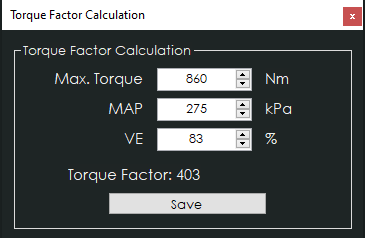
Example of a calculated torque factor
¶ Integration
NOTE!
All tuning should always be done by a professional in safe environment (track/dyno)
Before activating the blip function, it’s recommended to test downshifting and verify (realtime or logging) that the user table is behaving correctly during the blip. Starting values for tuning the blip should be low and gradually increased to avoid overrevving and undesired behavior/acceleration during shifting.
¶ CANTCU Configuration – Standard CAN
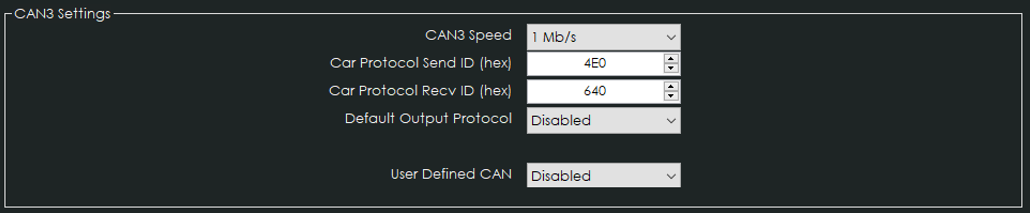
When using the standard GPRP package configuration, the Car Protocol Recv ID should be defined as 0x640h. MoTeC -> CANTCU-communication is predefined.
For the CANTCU -> MoTeC-communication, the Car Protocol Send ID can be freely chosen, but needs to be defined identically in the MoTeC configuration.
¶ MoTeC Configuration – Standard CAN
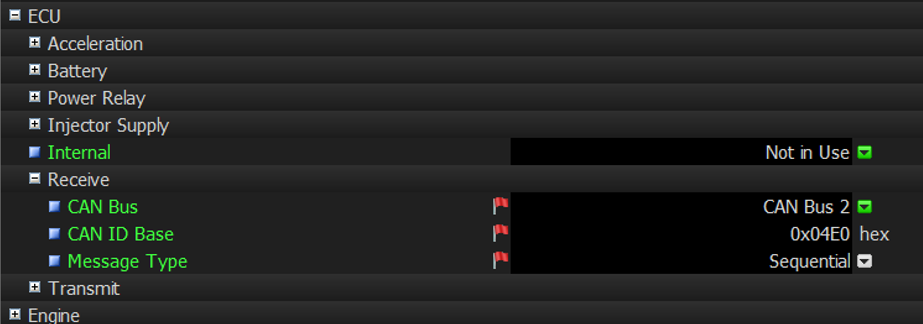
Values received from CANTCU should be first configured in the ECU -> Receive to match the CAN ID defined in CANTCU. Value mappings for variable offsets are listed below.
Values sent from CANTCU to MoTeC and their names/channels in MoTeC:
| Channel | ID | Type | Start Byte | Description | CANTCU variable | Scaling |
|---|---|---|---|---|---|---|
| CAN0 offset 0 | Base | INT16 | 0 | 0 / 1 | Cut Active | |
| CAN0 offset 2 | Base | INT16 | 2 | 0 / 1 | Blip Active | |
| CAN0 offset 4 | Base | INT16 | 4 | 2V = 1st Gear, 0.4V increments | Gear Number Main | |
| CAN0 offset 6 | Base | INT16 | 6 | 2V = 1st Gear, 0.4V increments | Gear Number Backup | |
| CAN1 offset 0 | Base + 1 | INT16 | 0 | from 0 to 1 | Cut % | x100 |
| CAN1 offset 2 | Base + 1 | INT16 | 2 | from 0 to 1 | Blip % | x100 |
| CAN1 offset 4 | Base + 1 | INT16 | 4 | -100% to 100% = -1V to +1V | Clutch Slip % | x100 |
| CAN1 offset 6 | Base + 1 | INT16 | 6 | -100% to 100% = -1V to +1V | Converter Slip % | x100 |
| CAN2 offset 0 | Base + 2 | INT16 | 0 | Input RPM | x1 | |
| CAN2 offset 2 | Base + 2 | INT16 | 2 | Output RPM | x1 | |
| CAN2 offset 4 | Base + 2 | INT16 | 4 | Delta RPM | x1 | |
| CAN2 offset 6 | Base + 2 | INT16 | 6 | -100C to +100C = -10V to +10V | TCU Oil Temperature | x100 |
Values sent from MoTeC to CANTCU:
| Name | ID | Type | Start Byte |
|---|---|---|---|
| Engine RPM | 0x640 | UINT16 | 0 |
| Engine MAP | 0x640 | UINT16 | 2 |
| TPS | 0x642 | UINT16 | 0 |
| Wheel Speed FL | 0x648 | UINT16 | 0 |
| Wheel Speed FR | 0x648 | UINT16 | 2 |
| Wheel Speed RL | 0x648 | UINT16 | 4 |
| Wheel Speed RR | 0x648 | UINT16 | 6 |
| Engine Coolant Temperature | 0x649 | UINT16 | 0 |
| Engine Oil Temperature | 0x649 | UINT16 | 8 |
| Brake State | 0x64E | UINT16 | bit 28 |
Available Realtime-values in CANTCU (sent from MoTeC)
| Engine RPM |
| TPS Value |
| Engine MAP |
| Wheel Speeds |
| Brake Switch |
| Coolant Temperature |
| Engine Oil Temperature |
Available Realtime-values in MoTeC (sent from CANTCU)
| Gear Number |
| Cut / Blip Active (0/1) |
| Cut / Blip % |
| Input RPM |
| Output RPM |
| Delta RPM |
| Clutch Slip % |
| Torque Converter Slip % |
| TCU Oil Temperature |
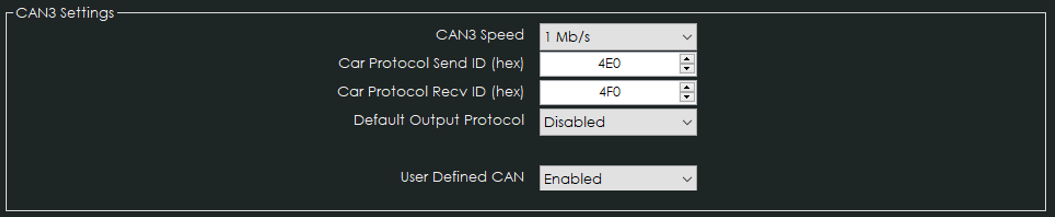
¶ CANTCU Configuration – User Defined CAN
When using the User Defined CAN -configuration, the Car Protocol Send & Recv IDs can be freely defined as long as they’re matched in the MoTeC-configuration.
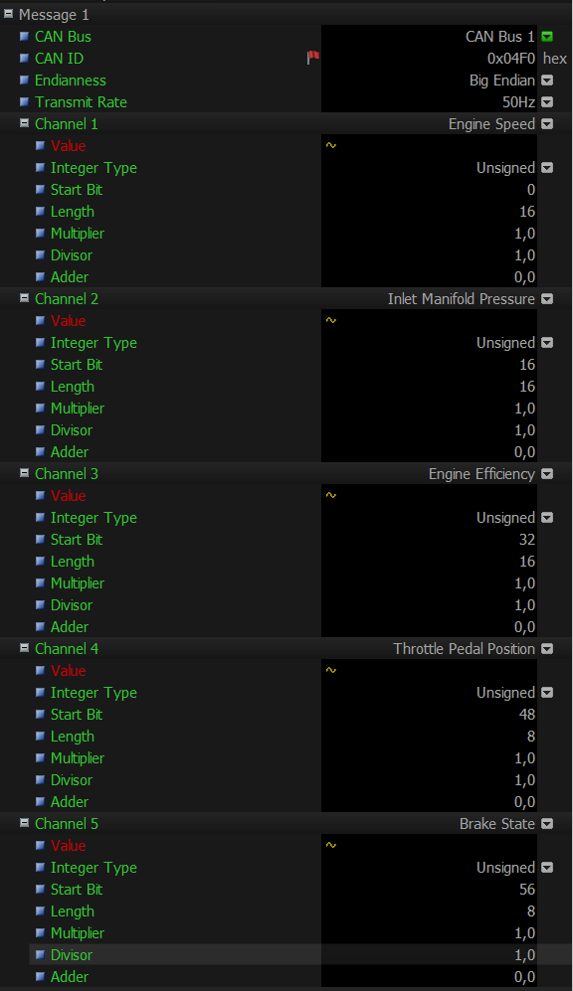
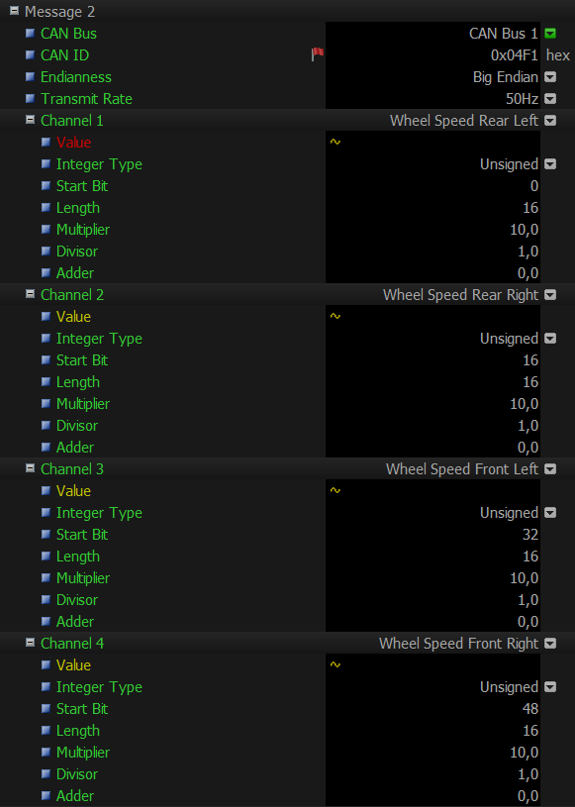
¶ MoTeC Configuration – User Defined CAN
Values sent from MoTeC to CANTCU need to be defined in the User Defined Dynamic Transmit messages found under External CAN Devices. Message 1 is mandatory as it includes all the necessary running values of the engine. Message 2 contains WheelSpeeds and is mandatory on DCT-transmissions, but optional when using 8HP transmissions (with simulated wheelspeed in CANTCU). The Message addressing (CAN ID) should be two consecutive addresses and Message 1 CAN ID should match the address input in CANTCU Car Protocol Send ID.