¶ Initial support in v1.0.131
CAN-communications based on the John Reed Racing package.
¶ Features
- Torque estimation from the ECU
- Cuts and blips 0/1 triggers through CAN
¶ Connection
CANTCU CAN3 is connected to MoTeC.
- CAN Speed is configurable
- CAN2.0B, Standard 11bit identifiers
- All 16 bit values are Little Endian
¶ Integration
¶ MoTeC Configuration
- JRR CAN setup
- Torque needs to be calculated in MoTeC (corrected & uncorrected)
¶ Available Parameters
Available Realtime-values in CANTCU (sent from MoTeC):
| Engine RPM |
| TPS Value |
| Engine MAP |
| Wheel Speeds |
| Brake Switch |
| Coolant Temperature |
| Engine Oil Temperature |
| Engine Torque (corrected) |
| Engine Torque (uncorrected) |
Available Realtime-values in MoTeC (sent from CANTCU):
| Gearbox Gear |
| Gearbox Drive Mode / DriveLogic Mode |
| Gearbox Oil Temperature |
| Gearbox Engine Target Torque |
| Shiftcut Parameters (digital / percentage) |
| Blip Parameters (digital / percentage) |
| Clutch Slip % |
| RPM Target |
| Delta values for Torque and RPM |
¶ Messaging Layout
| Rate | CAN ID | Type | Offset | Realtime variable | Unit | Factor |
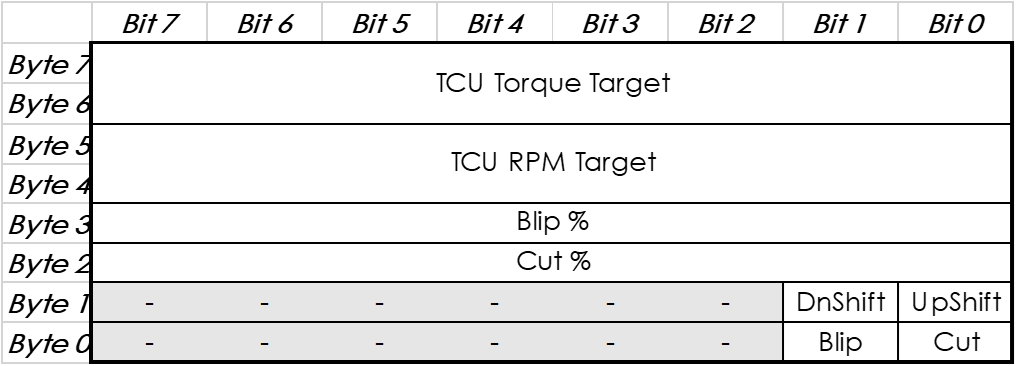
| 100 Hz | Base |
BIT |
0 |
Cut Active |
0/1 |
1 |
| 100 Hz | Base |
BIT |
1 |
Blip Active |
0/1 |
1 |
| 100 Hz | Base |
BIT |
8 |
UpShift Active |
0/1 |
1 |
| 100 Hz | Base |
BIT |
9 |
DownShift Active |
0/1 |
1 |
| 100 Hz | Base |
UINT8 |
16 |
Cut % |
% |
1 |
| 100 Hz | Base |
UINT8 |
24 |
Blip % |
% |
1 |
| 100 Hz | Base |
UINT16 |
32 |
TCU RPM Target |
RPM |
1 |
| 100 Hz | Base |
INT16 |
48 |
TCU Torque Target |
Nm |
1 |
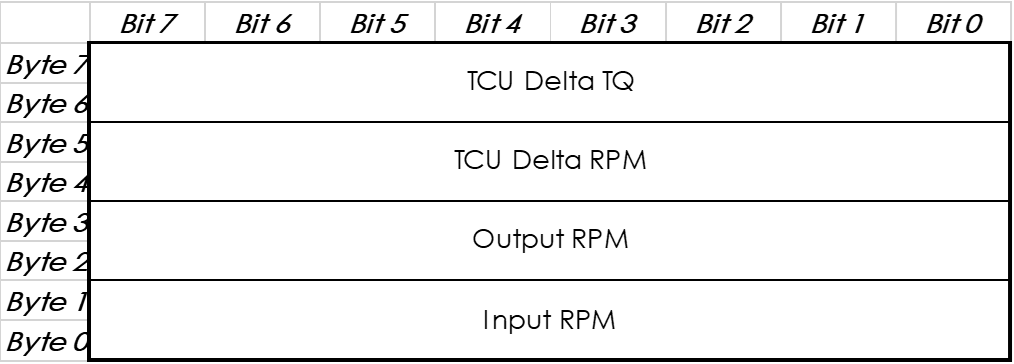
| 50 Hz | Base+1 |
UINT16 |
0 |
Input RPM |
RPM |
1 |
| 50 Hz | Base+1 |
UINT16 |
16 |
Output RPM |
RPM |
1 |
| 50 Hz | Base+1 |
UINT16 |
32 |
TCU Delta RPM |
RPM |
1 |
| 50 Hz | Base+1 |
INT16 |
48 |
TCU Delta TQ |
Nm |
1 |
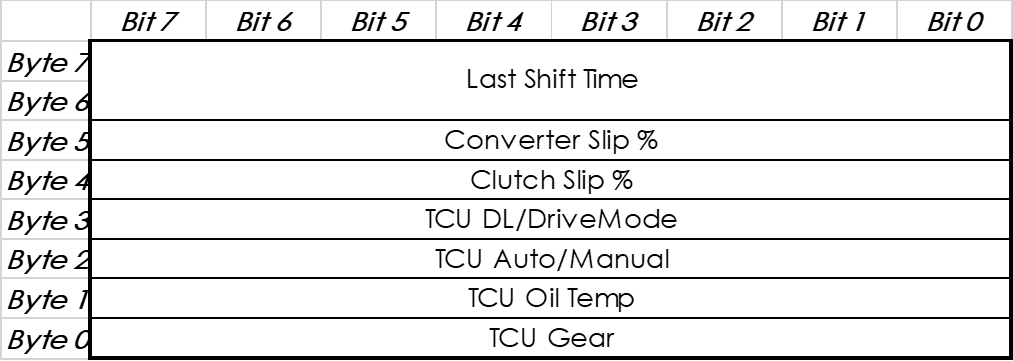
| 10 Hz | Base+2 |
INT8 |
0 |
TCU Gear |
1 |
|
| 10 Hz | Base+2 |
INT8 |
8 |
TCU Oil Temp |
C |
1 |
| 10 Hz | Base+2 |
UINT8 |
16 |
TCU Auto/Manual |
1 |
|
| 10 Hz | Base+2 |
UINT8 |
24 |
TCU DL/DriveMode |
1 |
|
| 10 Hz | Base+2 |
INT8 |
32 |
Clutch Slip % |
% |
1 |
| 10 Hz | Base+2 |
INT8 |
40 |
Converter Slip % |
% |
1 |
Base IDh
Base ID+1h
Base ID+2h