¶ Initial support in v1.0.133
Current ECU line is supported (S7 and newer) Old ECU line (S6+) is supported
¶ Features
- Uses Syvecs Torque Estimation
- Cuts based on Torque Limitation -function
- Blips triggered by CAN request
¶ Connection
- CANTCU CAN3 is connected to Syvecs CAN1 or CAN2
- CAN Speed is configurable
- CAN2.0B, Standard 11bit identifiers
- All values are 16 bit Big Endian
- CAN ID:s freely configurable
¶ Integration
NOTE!
All tuning should always be done by a professional in safe environment (track/dyno)
A poorly/incorrectly tuned blip may result in erratic behavior of the car during downshifts. It’s recommended to dial in cuts and blips on a rolling road dyno or a closed track. Starting values for tuning the blip should be low and gradually increased to avoid overrevving and undesired behavior/acceleration during the shift.
¶ Syvecs Configuration
Communication between CANTCU and Syvecs is fully done through CAN. CAN-messages with specific content needs to be added for both sending and receiving data. To achieve this, functions Generic CAN Transmit and Generic CAN Receive are used in the Syvecs.
These instructions define specific CAN ID:s to be used on both transmit and receive, but if needed, these CAN ID:s can be changed to a more suitable range.
Available Realtime-values in CANTCU (sent from Syvecs)
| Engine RPM |
| TPS Value |
| Engine Torque |
| Wheel Speeds |
| Brake Switch |
Available Realtime-values in Syvecs (sent from CANTCU)
| Engine Torque Limit |
| Gear Shift Manual Blip Request |
| Gear Position |
| Auto Trans Oil Temperature |
| TCMRpmTarget (E9x only) |
¶ Generic CAN Transmit
Three subsequent CAN messages need to be defined. Start by defining the message structure in Generic CAN Transmit -> Transmit Content. In this example, we are using the last three slots, but any three subsequent slots can be used. Define the variables identically to the picture below.

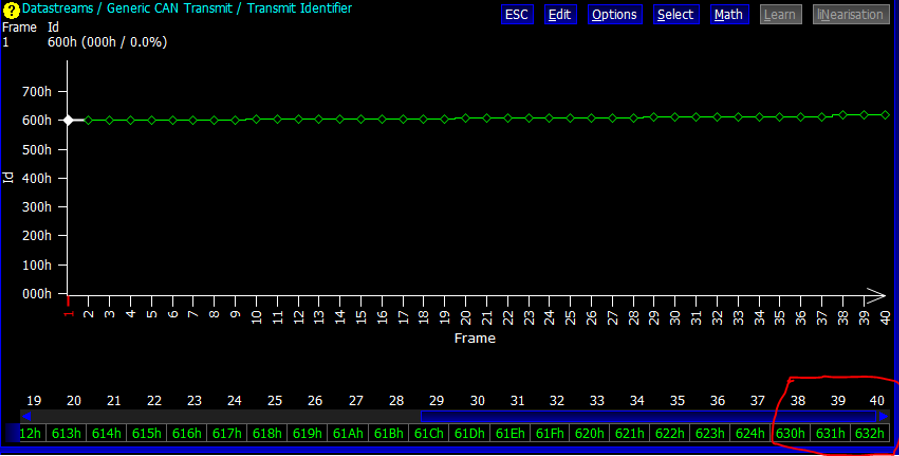
Next, define CAN ID:s for the earlier defined messages (Generic CAN Transmit -> Transmit Identifier). The ID:s also need to be subsequent, but can start at any address. The starting address (0x630h) needs to match the Car Protocol Recv ID in CANTCU.
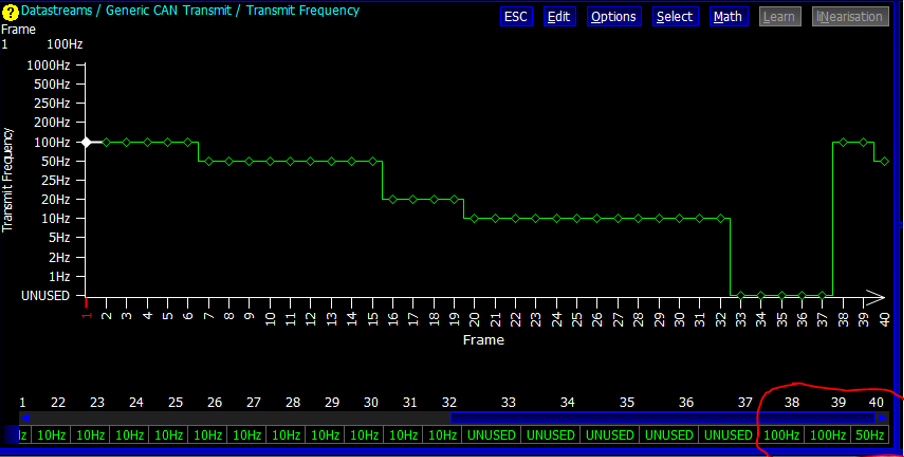
In Generic CAN Transmit -> Transmit Frequency, set the transmit rates for the messages to 100/100/50Hz for the configured message slots 38/39/40.
Lastly, verify that the Transmit Bus and the Bus Speed is correctly configured.
¶ Generic CAN Receive
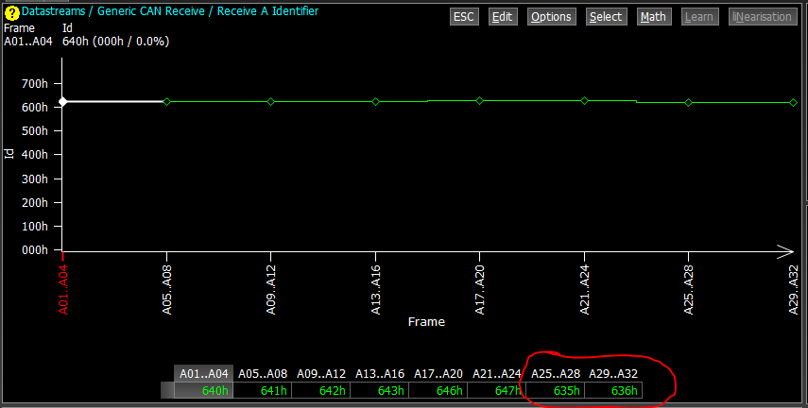
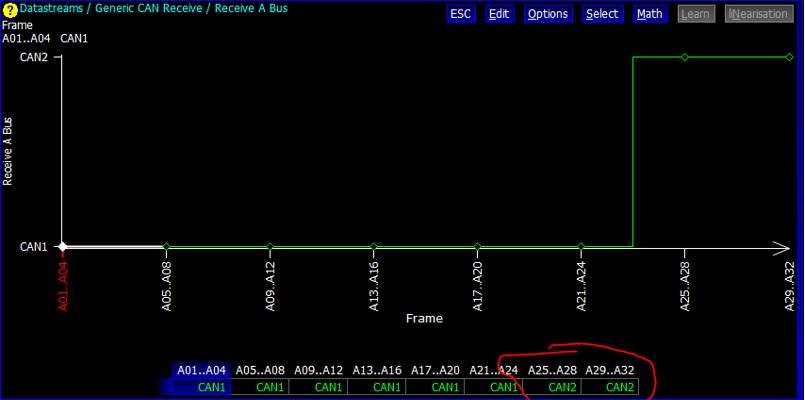
Two subsequent CAN messages need to be defined. Start by defining the identifiers in Generic CAN Receive -> Receive A Identifier. We use 0x635h & 0x636h mapped to CAN Receive A values A25-A32.
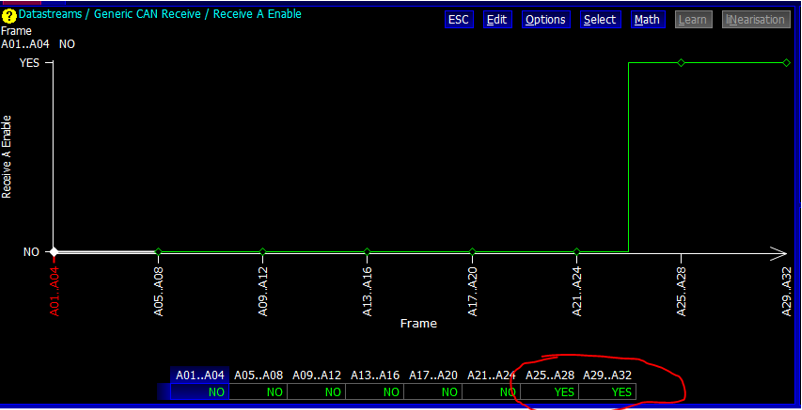
Remember to also enable the frames in Generic CAN Receive -> Receive A Enable and select the correct CAN-bus in Generic CAN Receive -> Receive A Bus.
¶ Inputs in Syvecs
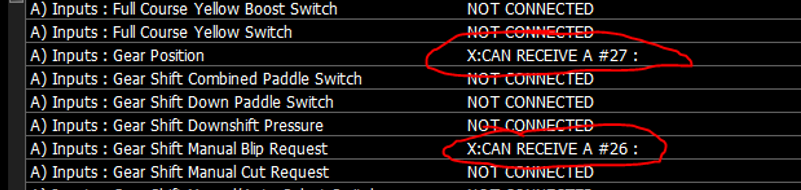
The values sent through CAN from CANTCU are received on Syvecs CAN Receive A25-A32 and can be defined for use in the IO Configuration -> Pin Assignments.
| Engine Torque Limit | CAN Receive A #25 |
| Gear Shift Manual Blip Request | CAN Receive A #26 |
| Gear Position | CAN Receive A #27 |
| Auto Trans Oil Temperature | CAN Receive A #28 |
| TCMRpmTarg (only E9x) | CAN Receive A #29 |
| WheelSpeed (v1.0.141 →) | CAN Receive A #30 |
¶ CANTCU Configuration
In CANTCU CAN configuration, the aforementioned starting CAN ID:s for both sending and receiving are used. The subsequent ID:s and their data will automatically be fetched from the CAN stream.
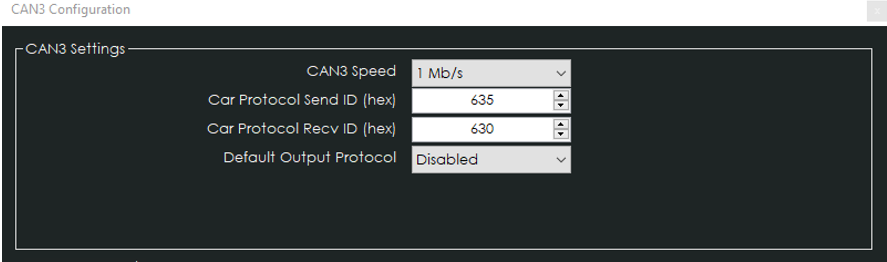
Remember to restart CANTCU after making changes to CAN settings.
¶ Optional - CANTCU TQ Estimation
If the Syvecs torque estimation model isn't dialed in fully, or not all parameters available, you can let CANTCU calculate the torque internally instead.
If you wish to use CANTCU TQ Estimation, you need to enable it in CANTCU CAN3 Configuration.
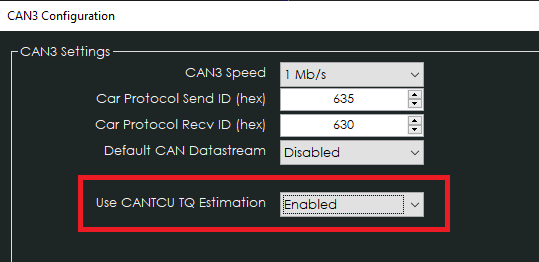
In Syvecs CAN Transmit, you will need to use MAP/Fuel Duty values instead of torques, defined as below.

By configuring like this, you can use the Torque Factor in CANTCU Tuning to dial in the indicated torque in CANTCU from estimated/measured maximum torque on a specific MAP/Fuel Duty.
¶ Tuning – Torque Limitation and Blips
For torque limitation (normally during upshifts) a limit value engTrqLim is sent through CAN to Syvecs. When this value falls under the current engine torque, a limitation takes place. There are several ways and criterias to perform torque limitation in Syvecs. If you aren’t familiar with how to tune the torque limitation, consider consulting your local Syvecs tuner or reseller.
For blips (normally during downshifts on certain drive modes), a blip request signal (0/1) is sent through CAN to Syvecs. The signal is active for as long as the blip is needed. As Syvecs is in charge of controlling the blip intensity, the tuning of blip accuracy and smoothness is all done in Syvecs, and preferably to be done by a tuner with knowledge of the blip logic.