¶ Initial support in v1.0.135
¶ Features
- Engine Parameters relayed to CANTCU via CAN-bus
- Freely definable ID for the CAN-communication
- Cut/Blip requests to M800 through CANTCU Digital Outputs
¶ Connection
CANTCU CAN3 is connected to CAN on Motec M800.
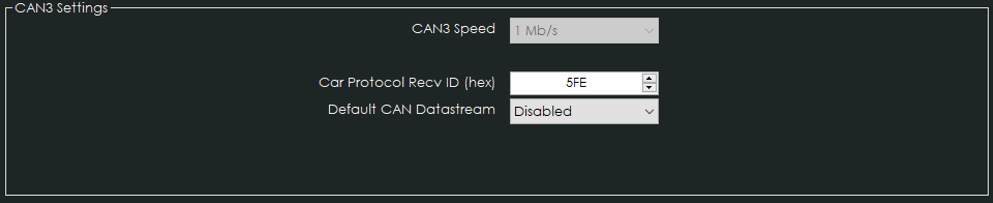
CAN Speed statically defined at 1Mbps
¶ Torque Factor (CANTCU)
To achieve a somewhat realistic torque estimation, we use a Torque Factor. The torque factor is generated from engine running values taken from a single point of running (usually maximum measured torque on a dyno run). The values needed for calculation are listed below.
- Maximum Engine Torque (Nm)
- Manifold Absolute Pressure, MAP (kPa)
- Max. Efficiency %, Fuel Table
Entering these values in the calculation window will generate a torque factor, which will be used as a baseline for torque calculations in the CANTCU.
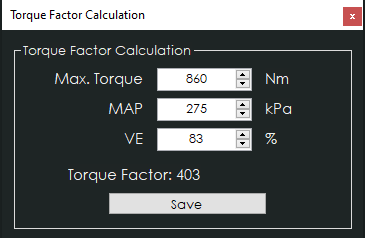
Example of a calculated torque factor
¶ Integration
NOTE!
All tuning should always be done by a professional in safe environment (track/dyno)
Before activating the blip function, it’s recommended to test downshifting and verify (realtime or logging) that the user table is behaving correctly during the blip. Starting values for tuning the blip should be low and gradually increased to avoid overrevving and undesired behavior/acceleration during the shift.
¶ M800 Configuration
The CAN-communication from M800 to CANTCU uses a Custom Data Set (number 2), with content defined exactly like the picture below.
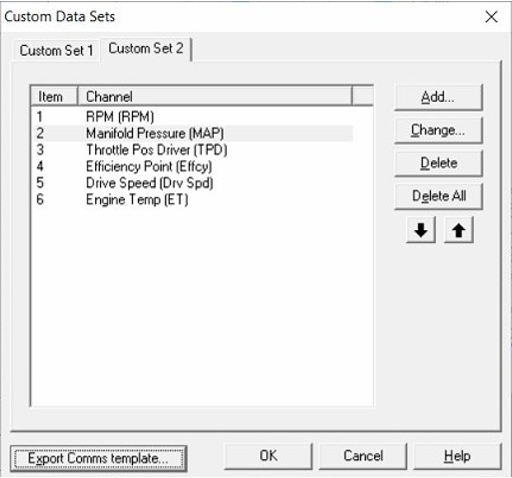
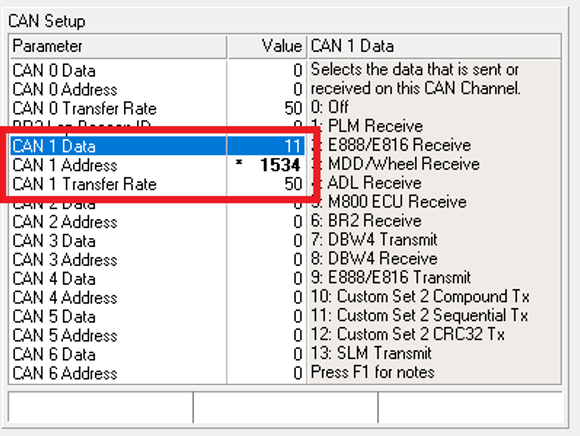
The Custom Data Set 2 can be broadcasted on either CAN 0 or CAN 1 depending on other devices on the bus. The type of the data set needs to be Sequential. Pictured below is the Custom Data Set 2 configured on CAN 1 as a Custom Data Set 2 Sequential Tx, on Address 1534 (0x5FEh) with a 50 Hz Transfer Rate.
¶ CANTCU Configuration
Motec M800 Protocol needs to be selected in configuration. Digital Outputs can be freely assigned to trigger on cuts/blips (grounding type).
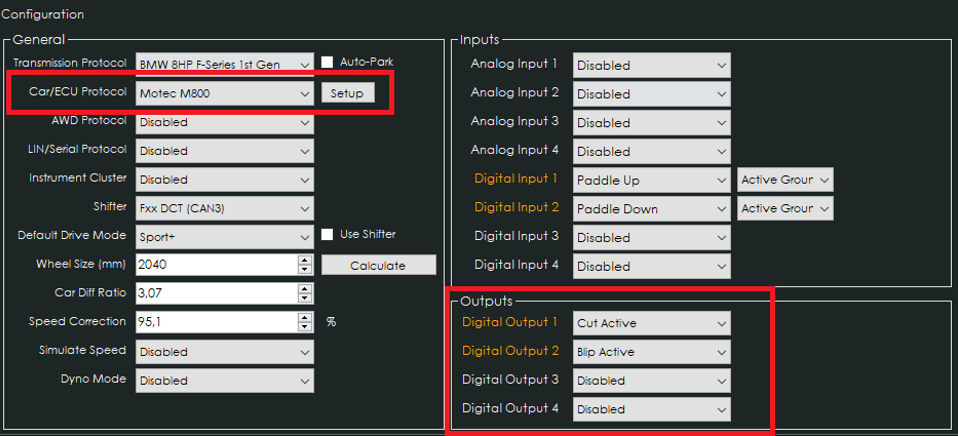
Car Protocol Recv ID needs to have the same CAN ID as defined to be sent out from the M800.
Available Realtime-values in CANTCU (sent from M800)
| Engine RPM |
| TPS Value (Pedal %) |
| Engine MAP |
| Drive Speed (if available in M800) |
| Engine Coolant Temperature |