¶ Initial support in v1.0.134
Supported ECUs: Delta 700,880, 900 and GDI6 ECUs (FW 01.06.2023 or newer)
¶ Features
- Uses SCS Delta Torque Estimation
- Cuts based on Torque Management -function
- Blips based on RPM Targeting from CANTCU
¶ Connection
CANTCU CAN3 is connected to SCS Delta CAN1 or CAN2.
- CAN2.0B, Standard 11bit identifiers
- CAN Speed is configurable
- CAN I/O Addressing is configurable
¶ Integration
NOTE!
All tuning should always be done by a professional in a safe environment (track/dyno)
RPM Targeting (blips) on downshifts needs to be carefully tuned to avoid undesired behavior (overshoot/undershoot) of the blip. Especially on DCT transmissions, the RPM request sent from CANTCU to SCS Delta is heavily dependent on a correctly calibrated diff ratio/wheelspeed.
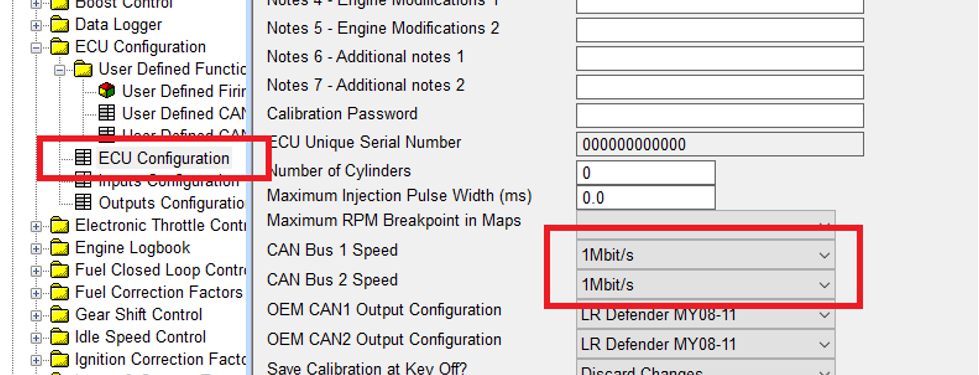
¶ SCS Delta CAN Configuration
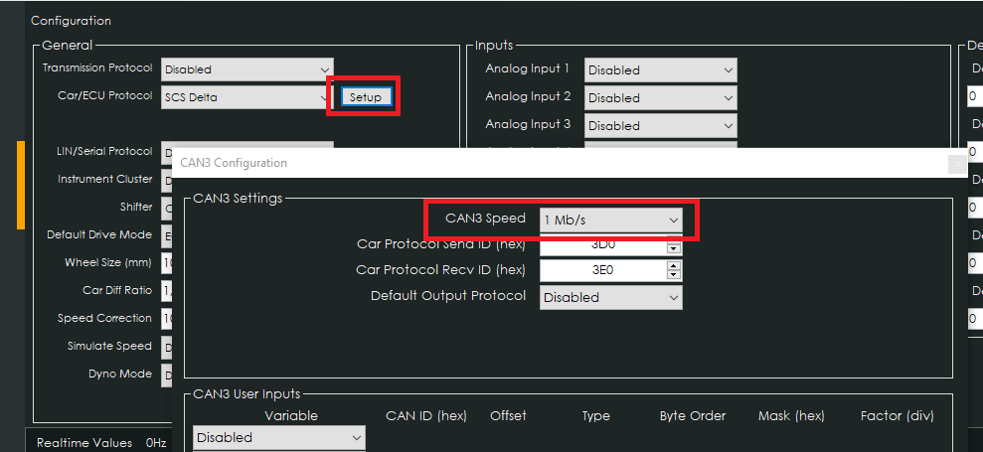
Select a matching CAN speed/frequency in both SXTune and CANTCU Configurator.
User defined CAN Inputs settings as below. Note that CAN 1 is selected, change to CAN 2 if required depending on which ECU CAN bus the CANTCU is connected to.
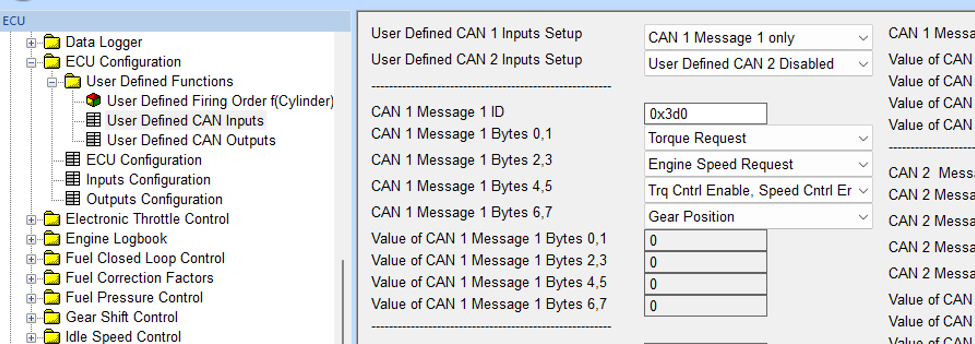
User defined CAN output settings as below. Note that CAN 1 is selected, change to CAN 2 if required depending on which ECU CAN bus the CANTCU is connected to.
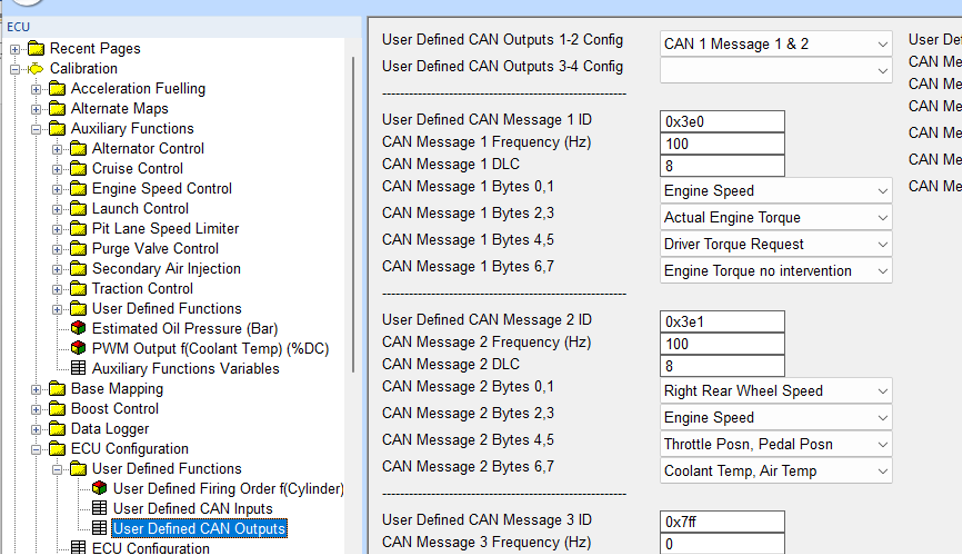
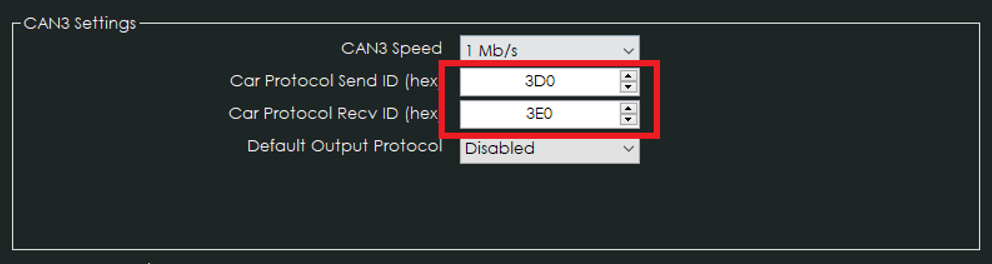
Match the CANTCU Send ID and Recv ID to IDs used in SXTune.
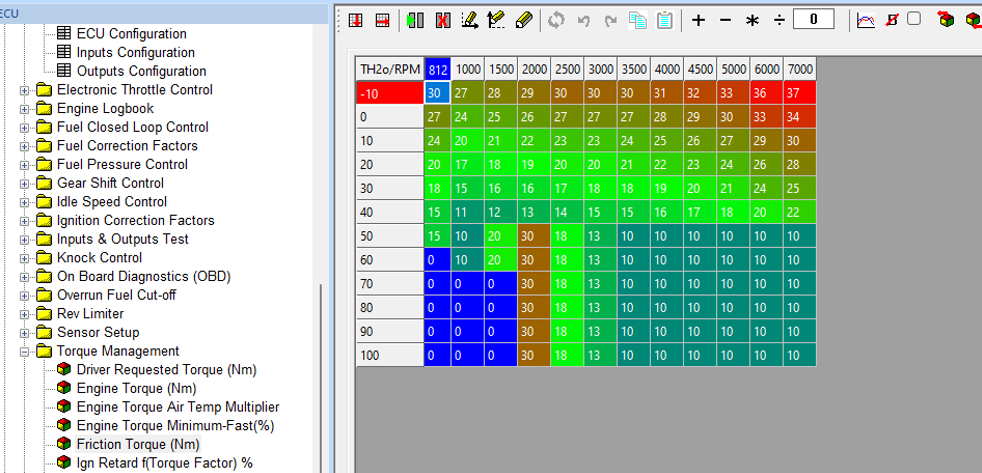
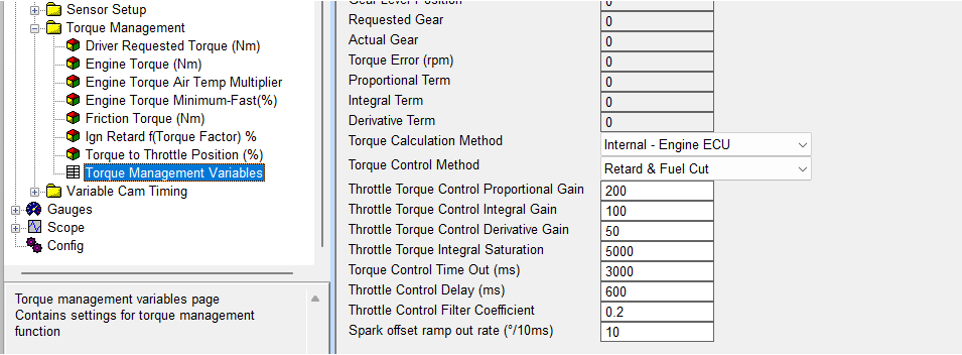
¶ Torque Management Settings
In Torque Management, set variables as below:
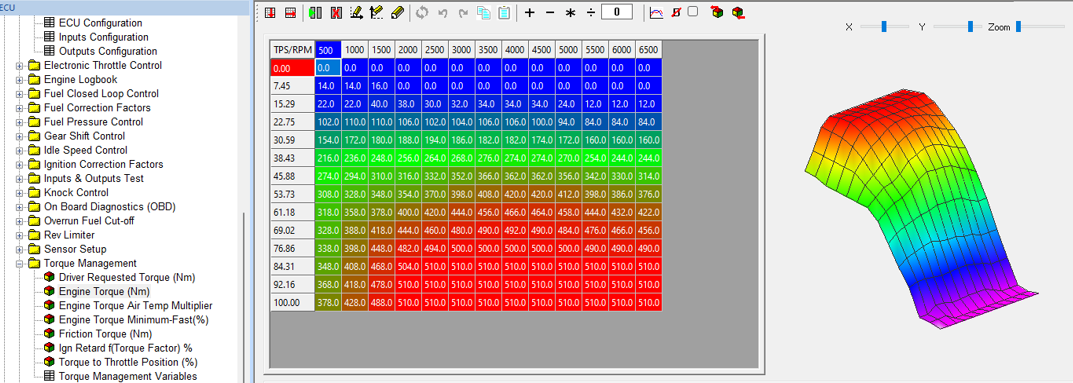
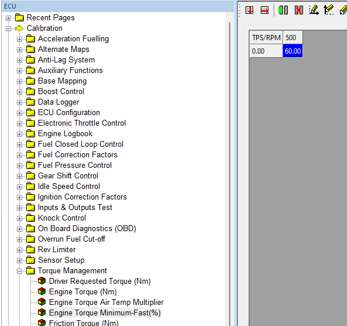
Example Engine Torque map. This map should be calibrated on a dyno or rolling road, and it can be estimated from a full load power curve. If transmission slip is experienced on low/medium load, increase the values in corresponding part of the map.
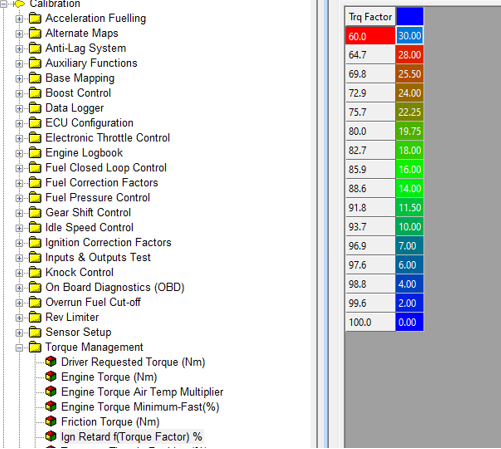
Ignition Retard f(Torque Factor) %. If torque reduction on upshifts feel too aggressive/excessive, decrease the values in this map.
Engine Torque Minimum-Fast(%)
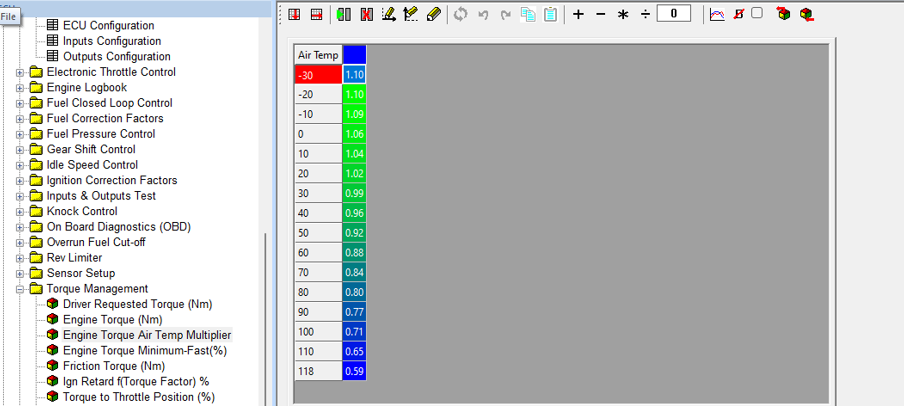
Engine Torque Air Temp Multiplier
Friction Torque example map