
CANTCU
Hardware
Integrations
- ECUs
- Dashes
- Drivetrain
Software
-
- Configuration
- Diagnostics
- Flashing
Installation Manual
Technical info
Transmissions
Transmissions
![]()
Initial v1.0 support in v1.0.127, v1.1 support in v1.0.134
CANTCU CAN3 is connected to the MaxxECU CAN-bus.
To achieve a somewhat realistic torque estimation, the VE (fuel) table needs to be tuned and MaxxECU correctly configured to show real-world VE values (Multiply Lambda). For this torque estimation we use a Torque Factor. The torque factor is generated from engine running values taken from a single point of running (usually maximum measured torque on a dyno run). The values needed for calculation are listed below.
Entering these values in the calculation window will generate a torque factor, which will be used as a baseline for torque calculations in the CANTCU.
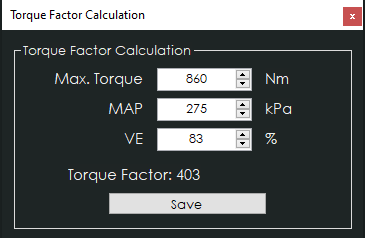 Example of a calculated torque factor
Example of a calculated torque factor
If using Simulated WheelSpeed in CANTCU, the WheelSpeed is broadcasted from CANTCU to MaxxECU. Be sure to select “CAN-bus” as Speed source under Speed/Gear in MTune.